
|
|
latest version v1.9 - last update 10 Apr 2010 |
|
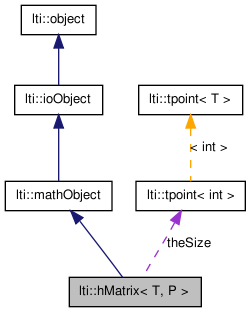
Homogeneous matrix for projective space transformations. More...
#include <ltiHTypes.h>

Public Types | |
| typedef T | value_type |
| typedef point | size_type |
Public Member Functions | |
| hMatrix () | |
| hMatrix (const hMatrix< T, P > &other) | |
| hMatrix (const matrix< T > &other) | |
| virtual | ~hMatrix () |
| void | clear () |
| void | unit () |
| const point & | size () const |
| virtual const char * | getTypeName () const |
| virtual mathObject * | clone () const |
| hMatrix< T, P > & | copy (const hMatrix< T, P > &other) |
| hMatrix< T, P > & | copy (const matrix< T > &other) |
| hMatrix< T, P > & | operator= (const hMatrix< T, P > &other) |
| matrix< T > & | castTo (matrix< T > &result) const |
| hMatrix< T, P > & | castFrom (const matrix< T > &other) |
| virtual bool | write (ioHandler &handler, const bool complete=true) const |
| virtual bool | read (ioHandler &handler, const bool complete=true) |
| hMatrix< T, P > & | multiply (const hMatrix< T, P > &other) |
| hMatrix< T, P > & | leftMultiply (const hMatrix< T, P > &other) |
| hMatrix< T, P > & | multiply (const hMatrix< T, P > &a, const hMatrix< T, P > &b) |
| hMatrix< T, P > | operator* (const hMatrix< T, P > &other) const |
| hMatrix< T, P > & | operator*= (const hMatrix< T, P > &other) |
| P & | multiply (const P &other, P &result) const |
| P | operator* (const P &p) const |
| T & | at (const int &m, const int &n) |
| const T & | at (const int &m, const int &n) const |
| T * | operator[] (const int &m) |
| const T * | operator[] (const int &m) const |
| hMatrix< T, P > & | invert () |
| hMatrix< T, P > & | invert (const hMatrix< T, P > &other) |
| hMatrix< T, P > & | transpose () |
| hMatrix< T, P > & | transpose (const hMatrix< T, P > &other) |
| void | setScaleFactor (const T &s) |
| const T & | getScaleFactor () const |
| void | scale (const T &s) |
| void | scaleR (const T &s) |
| void | setTranslation (const P &thePoint) |
| P | getTranslation () const |
| void | translate (const P &thePoint) |
| void | rotate (const double &angle, const hPoint3D< T > &axis=hPoint3D< T >(0, 0, 1), const hPoint3D< T > ¢er=hPoint3D< T >()) |
| void | setRotation (const double &angle, const hPoint3D< T > &axis=hPoint3D< T >(0, 0, T(1)), const hPoint3D< T > ¢er=hPoint3D< T >()) |
| void | setSimilarityTransform (const tpoint< T > &t, const T &angle, const T &scaling) |
Protected Member Functions | |
| void | initMem () |
Protected Attributes | |
| T * | theElements |
| T ** | theRows |
| T * | postElement |
| const point | theSize |
Homogeneous matrix for projective space transformations.
The template class T indicates the contained type and the class P the point type (hPoint2D or hPoint3D)
| typedef point lti::hMatrix< T, P >::size_type |
return type of the size() member
| typedef T lti::hMatrix< T, P >::value_type |
type of the contained data
| lti::hMatrix< T, P >::hMatrix | ( | ) |
| lti::hMatrix< T, P >::hMatrix | ( | const hMatrix< T, P > & | other | ) |
Copy constructor.
| lti::hMatrix< T, P >::hMatrix | ( | const matrix< T > & | other | ) |
Copy constructor.
| virtual lti::hMatrix< T, P >::~hMatrix | ( | ) | [virtual] |
Destructor.
| const T& lti::hMatrix< T, P >::at | ( | const int & | m, | |
| const int & | n | |||
| ) | const [inline] |
Return value a row m and column n.
| T& lti::hMatrix< T, P >::at | ( | const int & | m, | |
| const int & | n | |||
| ) | [inline] |
Return value at row m and column n.
| hMatrix<T,P>& lti::hMatrix< T, P >::castFrom | ( | const matrix< T > & | other | ) |
Copy the content of the given lti::matrix into this hmatrix.
| matrix<T>& lti::hMatrix< T, P >::castTo | ( | matrix< T > & | result | ) | const |
Copy the contents of this hmatrix into the given lti::matrix.
| void lti::hMatrix< T, P >::clear | ( | ) |
Clean matrix (all elements with 0).
| virtual mathObject* lti::hMatrix< T, P >::clone | ( | ) | const [virtual] |
Returns a copy of this object.
Implements lti::mathObject.
| hMatrix<T,P>& lti::hMatrix< T, P >::copy | ( | const matrix< T > & | other | ) |
Copy operator.
| hMatrix<T,P>& lti::hMatrix< T, P >::copy | ( | const hMatrix< T, P > & | other | ) |
Copy operator.
Reimplemented from lti::ioObject.
Referenced by lti::hMatrix< float, hPoint3D< float > >::operator=().
| const T& lti::hMatrix< T, P >::getScaleFactor | ( | ) | const |
Return the scale factor used in the transformation.
The scale factor is the element with the greatest indices. Changing its value from one will imply a scaling of everything, including the translation factors.
| P lti::hMatrix< T, P >::getTranslation | ( | ) | const |
return a non-homegeneous point with the actual translation vector
| virtual const char* lti::hMatrix< T, P >::getTypeName | ( | void | ) | const [inline, virtual] |
Returns the name of this class.
Reimplemented from lti::mathObject.
| void lti::hMatrix< T, P >::initMem | ( | ) | [protected] |
Initialize the memory.
This method allocates theElements and theRows and ensures that theRows points to each row in theElements.
| hMatrix<T,P>& lti::hMatrix< T, P >::invert | ( | const hMatrix< T, P > & | other | ) |
Copy here the other matrix inverted.
| hMatrix<T,P>& lti::hMatrix< T, P >::invert | ( | ) |
Invert this matrix an return a reference to it.
| hMatrix<T,P>& lti::hMatrix< T, P >::leftMultiply | ( | const hMatrix< T, P > & | other | ) |
| P& lti::hMatrix< T, P >::multiply | ( | const P & | other, | |
| P & | result | |||
| ) | const |
Multiply with a point and leave the result in the second parameters.
Return a reference to the second parameters
Reimplemented in lti::hMatrix2D< T >, and lti::hMatrix3D< T >.
| hMatrix<T,P>& lti::hMatrix< T, P >::multiply | ( | const hMatrix< T, P > & | a, | |
| const hMatrix< T, P > & | b | |||
| ) |
Multiply the matrices a and b and leave the result here.
Reimplemented in lti::hMatrix3D< float >.
| hMatrix<T,P>& lti::hMatrix< T, P >::multiply | ( | const hMatrix< T, P > & | other | ) |
Multiply this matrix with another homogeneous matrix and leave the result here.
Reimplemented in lti::hMatrix3D< float >.
Referenced by lti::hMatrix< float, hPoint3D< float > >::operator*(), and lti::hMatrix< float, hPoint3D< float > >::operator*=().
| P lti::hMatrix< T, P >::operator* | ( | const P & | p | ) | const [inline] |
Multiply with a homogeneous point.
Reimplemented in lti::hMatrix2D< T >, and lti::hMatrix3D< T >.
| hMatrix<T,P> lti::hMatrix< T, P >::operator* | ( | const hMatrix< T, P > & | other | ) | const [inline] |
| hMatrix<T,P>& lti::hMatrix< T, P >::operator*= | ( | const hMatrix< T, P > & | other | ) | [inline] |
Alias for multiply.
Reimplemented in lti::hMatrix3D< float >.
| hMatrix<T,P>& lti::hMatrix< T, P >::operator= | ( | const hMatrix< T, P > & | other | ) | [inline] |
Copy operator.
Reimplemented from lti::ioObject.
| const T* lti::hMatrix< T, P >::operator[] | ( | const int & | m | ) | const [inline] |
Read-only access operator to a row.
| T* lti::hMatrix< T, P >::operator[] | ( | const int & | m | ) | [inline] |
Access operator to a row.
| virtual bool lti::hMatrix< T, P >::read | ( | ioHandler & | handler, | |
| const bool | complete = true | |||
| ) | [virtual] |
Read the object from the given ioHandler.
Reimplemented from lti::mathObject.
Referenced by lti::read().
| void lti::hMatrix< T, P >::rotate | ( | const double & | angle, | |
| const hPoint3D< T > & | axis = hPoint3D< T >(0, 0, 1), |
|||
| const hPoint3D< T > & | center = hPoint3D< T >() | |||
| ) |
| void lti::hMatrix< T, P >::scale | ( | const T & | s | ) |
Multiply the scale factor with this value.
The scale factor is the element with the greatest indices. Changing its value from one will imply a scaling of everything, including the translation factors.
| void lti::hMatrix< T, P >::scaleR | ( | const T & | s | ) |
| void lti::hMatrix< T, P >::setRotation | ( | const double & | angle, | |
| const hPoint3D< T > & | axis = hPoint3D< T >(0, 0, T(1)), |
|||
| const hPoint3D< T > & | center = hPoint3D< T >() | |||
| ) |
| void lti::hMatrix< T, P >::setScaleFactor | ( | const T & | s | ) |
Set the scale factor of the transformation.
This is the element with the greatest indices. Changing its value from one will imply a scaling of everything, including the translation factors.
| void lti::hMatrix< T, P >::setSimilarityTransform | ( | const tpoint< T > & | t, | |
| const T & | angle, | |||
| const T & | scaling | |||
| ) |
| void lti::hMatrix< T, P >::setTranslation | ( | const P & | thePoint | ) |
| const point& lti::hMatrix< T, P >::size | ( | ) | const [inline] |
Return the size of the matrix in a lti::point structure.
x coordinate and the number of rows in its y coordinate. | void lti::hMatrix< T, P >::translate | ( | const P & | thePoint | ) |
| hMatrix<T,P>& lti::hMatrix< T, P >::transpose | ( | const hMatrix< T, P > & | other | ) |
Copy the transposed other matrix here.
| hMatrix<T,P>& lti::hMatrix< T, P >::transpose | ( | ) |
Transpose this matrix an return a reference to it.
| void lti::hMatrix< T, P >::unit | ( | ) |
| virtual bool lti::hMatrix< T, P >::write | ( | ioHandler & | handler, | |
| const bool | complete = true | |||
| ) | const [virtual] |
Write the object in the given ioHandler.
Reimplemented from lti::mathObject.
Referenced by lti::write().
T* lti::hMatrix< T, P >::postElement [protected] |
Pointer to the element after the last element of the data.
T* lti::hMatrix< T, P >::theElements [protected] |
Memory block with all elements.
T** lti::hMatrix< T, P >::theRows [protected] |
Pointers to each row.
Referenced by lti::hMatrix< float, hPoint3D< float > >::at(), and lti::hMatrix< float, hPoint3D< float > >::operator[]().
const point lti::hMatrix< T, P >::theSize [protected] |
The real size of the matrix.
![\[ \begin{bmatrix} s\cdot \cos(\alpha) & s\cdot -\sin(\alpha) & 0 & t_x \\ s\cdot \sin(\alpha) & s\cdot \cos(\alpha) & 0 & t_y \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} \]](form_69.png)
 the
the  the translation.
the translation.