
|
|
latest version v1.9 - last update 10 Apr 2010 |
|
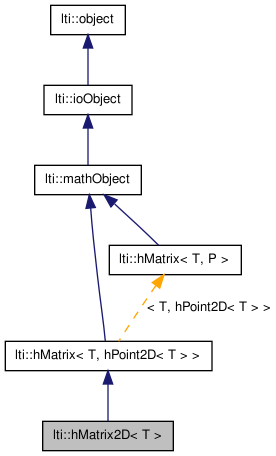
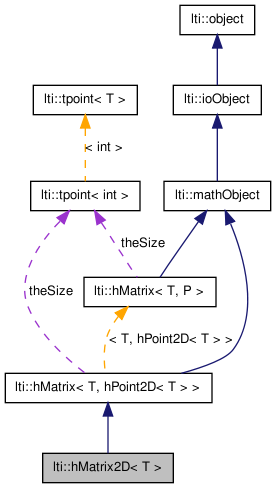
Homogeneous matrix to represent linear transformations in a two-dimensional projective space. More...
#include <ltiHTypes.h>
Public Member Functions | |
| hMatrix2D () | |
| hMatrix2D (const hMatrix2D< T > &other) | |
| hMatrix2D (const matrix< T > &other) | |
| virtual | ~hMatrix2D () |
| hMatrix2D< T > & | multiply (const hMatrix2D< T > &other) |
| hMatrix2D< T > & | multiply (const hMatrix2D< T > &a, const hMatrix2D< T > &b) |
| hMatrix2D< T > | operator* (const hMatrix2D< T > &other) const |
| hMatrix2D< T > & | operator*= (const hMatrix2D< T > &other) |
| hPoint2D< T > & | multiply (const hPoint2D< T > &other, hPoint2D< T > &result) const |
| hPoint2D< T > | operator* (const hPoint2D< T > &p) const |
| tpoint< T > & | multiply (const tpoint< T > &other, tpoint< T > &result) const |
| tpoint< T > | operator* (const tpoint< T > &p) const |
Homogeneous matrix to represent linear transformations in a two-dimensional projective space.
The two-dimensional transformations are represented by 3x3 matrices of the form:
![\[\begin{bmatrix} r_1 & r_2 & t_x \\ r_3 & r_4 & t_y \\ 0 & 0 & 1 \end{bmatrix}\]](form_65.png)
where the terms  represent a rotation and scaling and the terms
represent a rotation and scaling and the terms  the translation.
the translation.
| lti::hMatrix2D< T >::hMatrix2D | ( | ) |
Default constructor.
| lti::hMatrix2D< T >::hMatrix2D | ( | const hMatrix2D< T > & | other | ) |
Copy constructor.
| lti::hMatrix2D< T >::hMatrix2D | ( | const matrix< T > & | other | ) |
Copy constructor.
| virtual lti::hMatrix2D< T >::~hMatrix2D | ( | ) | [virtual] |
Destructor.
| tpoint<T>& lti::hMatrix2D< T >::multiply | ( | const tpoint< T > & | other, | |
| tpoint< T > & | result | |||
| ) | const |
Multiply with a point and leave the result in the second parameters.
Return a reference to the second parameters
| hPoint2D<T>& lti::hMatrix2D< T >::multiply | ( | const hPoint2D< T > & | other, | |
| hPoint2D< T > & | result | |||
| ) | const [inline] |
Multiply with a point and leave the result in the second parameters.
Return a reference to the second parameters
Reimplemented from lti::hMatrix< T, hPoint2D< T > >.
References lti::hMatrix2D< T >::multiply().
| hMatrix2D<T>& lti::hMatrix2D< T >::multiply | ( | const hMatrix2D< T > & | a, | |
| const hMatrix2D< T > & | b | |||
| ) | [inline] |
Multiply the matrices a and b and leave the result here.
References lti::hMatrix2D< T >::multiply().
| hMatrix2D<T>& lti::hMatrix2D< T >::multiply | ( | const hMatrix2D< T > & | other | ) | [inline] |
Multiply this matrix with another homogeneous matrix and leave the result here.
Referenced by lti::hMatrix2D< T >::multiply(), lti::hMatrix2D< T >::operator*(), and lti::hMatrix2D< T >::operator*=().
| tpoint<T> lti::hMatrix2D< T >::operator* | ( | const tpoint< T > & | p | ) | const [inline] |
Multiply with a point.
References lti::hMatrix2D< T >::multiply().
| hPoint2D<T> lti::hMatrix2D< T >::operator* | ( | const hPoint2D< T > & | p | ) | const [inline] |
Multiply with a point.
Reimplemented from lti::hMatrix< T, hPoint2D< T > >.
References lti::hMatrix2D< T >::multiply().
| hMatrix2D<T> lti::hMatrix2D< T >::operator* | ( | const hMatrix2D< T > & | other | ) | const [inline] |
Return a new object which is the result of multiplying this matrix with the other one.
References lti::hMatrix2D< T >::multiply().
| hMatrix2D<T>& lti::hMatrix2D< T >::operator*= | ( | const hMatrix2D< T > & | other | ) | [inline] |
Alias for multiply.
References lti::hMatrix2D< T >::multiply().