
|
|
latest version v1.9 - last update 10 Apr 2010 |
|
A discrete linear Kalman filter implementation. More...
#include <ltiKalmanFilter.h>
Classes | |
| class | parameters |
| The parameters for the class kalmanFilter. More... | |
Public Member Functions | |
| kalmanFilter () | |
| kalmanFilter (const kalmanFilter &other) | |
| virtual | ~kalmanFilter () |
| virtual const char * | getTypeName () const |
| bool | apply (const lti::vector< float > &measurement) |
| bool | apply (const lti::vector< float > &measurement, const lti::vector< float > &control) |
| bool | apply () |
| bool | applyMeasurementUpdate (const lti::vector< float > &measurement) |
| bool | applyTimeUpdate (const lti::vector< float > &control) |
| bool | applyTimeUpdate () |
| kalmanFilter & | copy (const kalmanFilter &other) |
| virtual functor * | clone () const |
| const parameters & | getParameters () const |
| const vector< float > & | getEstimate () const |
| const vector< float > & | getEstimateAposteriori () const |
| const matrix< float > & | getErrorCovarianceApriori () const |
| const matrix< float > & | getErrorCovarianceAposteriori () const |
| void | reset () |
Protected Member Functions | |
| bool | timeUpdate (const vector< float > &controlVector) |
| bool | timeUpdate () |
| bool | measurementUpdate (const vector< float > &measurementVector) |
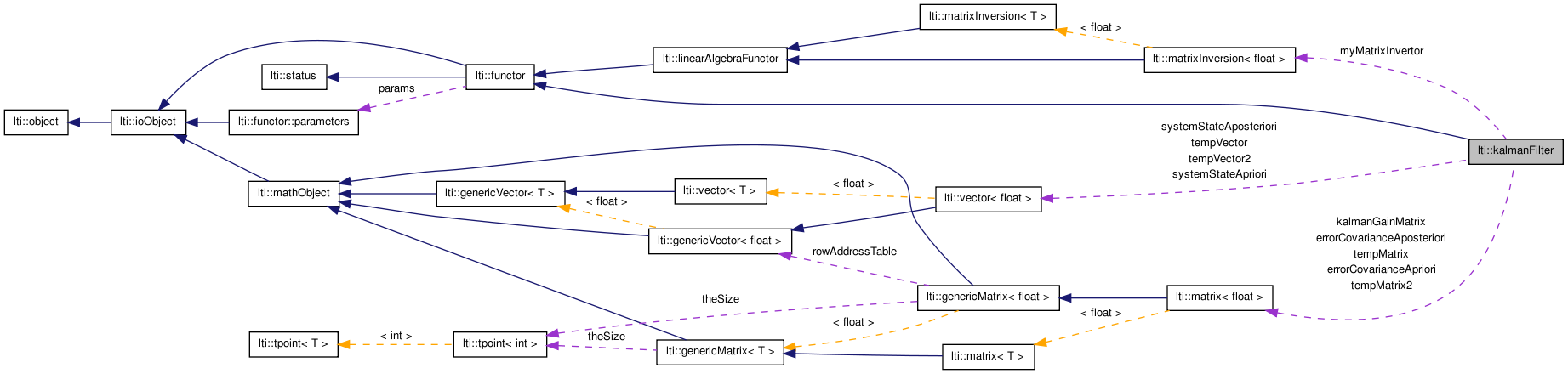
Protected Attributes | |
Internal State | |
| vector< float > | systemStateApriori |
| vector< float > | systemStateAposteriori |
| matrix< float > | kalmanGainMatrix |
| matrix< float > | errorCovarianceApriori |
| matrix< float > | errorCovarianceAposteriori |
Temporary | |
| matrix< float > | tempMatrix |
| matrix< float > | tempMatrix2 |
| vector< float > | tempVector |
| vector< float > | tempVector2 |
| matrixInversion< float > | myMatrixInvertor |
A discrete linear Kalman filter implementation.
Kalman filters can be used to estimate the state of a dynamic system from noisy measurement data.
This implementation uses (at some places) the nomenclature from the following tech report:
Theory: "An Introduction to the Kalmen Filter" by Greg Welch and Gary Bishop, Department of Computer Science, University of North Carolina at Chapel Hill. http://www.cs.unc.edu/~welch/kalman/kalmanIntro.html
| lti::kalmanFilter::kalmanFilter | ( | ) |
Default constructor.
| lti::kalmanFilter::kalmanFilter | ( | const kalmanFilter & | other | ) |
copy constructor
| other | the object to be copied |
| virtual lti::kalmanFilter::~kalmanFilter | ( | ) | [virtual] |
destructor
| bool lti::kalmanFilter::apply | ( | ) |
Perform a time update without control input.
This call results in a new a priori prediction available via getEstimate.
| bool lti::kalmanFilter::apply | ( | const lti::vector< float > & | measurement, | |
| const lti::vector< float > & | control | |||
| ) |
Perform a measurement update using the given measurement, followed by a time update with the given control.
This call results in a new (a priori) prediction available via getEstimate.
| bool lti::kalmanFilter::apply | ( | const lti::vector< float > & | measurement | ) |
Perform a measurement update using the given measurement, followed by a time update with a control vector of zero.
This call results in a new prediction available via getEstimate.
| bool lti::kalmanFilter::applyMeasurementUpdate | ( | const lti::vector< float > & | measurement | ) |
Perform a measurement update using the given measurement.
This call results in a new a posteriori prediction available via getEstimateAposteriori. This method is identical to apply(const lti::vector<float>&).
| bool lti::kalmanFilter::applyTimeUpdate | ( | ) |
Perform a time update without control input.
This call results in a new a priori prediction available via getEstimate.
| bool lti::kalmanFilter::applyTimeUpdate | ( | const lti::vector< float > & | control | ) |
Perform a time update using the given control.
This call results in a new a priori prediction available via getEstimate.
| virtual functor* lti::kalmanFilter::clone | ( | ) | const [virtual] |
returns a pointer to a clone of this functor.
Implements lti::functor.
| kalmanFilter& lti::kalmanFilter::copy | ( | const kalmanFilter & | other | ) |
copy data of "other" functor.
| other | the functor to be copied |
Reimplemented from lti::functor.
| const matrix<float>& lti::kalmanFilter::getErrorCovarianceAposteriori | ( | ) | const |
Get the a posteriori error covariance ( ).
).
| const matrix<float>& lti::kalmanFilter::getErrorCovarianceApriori | ( | ) | const |
Get the a priori error covariance ( ).
).
| const vector<float>& lti::kalmanFilter::getEstimate | ( | ) | const |
Get the (a priori) system state estimate ( ).
).
This is the prediction one would normally be interested in.
| const vector<float>& lti::kalmanFilter::getEstimateAposteriori | ( | ) | const |
Get the a posteriori system state estimate ( ).
).
This value is primarily of internal use and not of interest to the user.
| const parameters& lti::kalmanFilter::getParameters | ( | ) | const |
returns used parameters
Reimplemented from lti::functor.
| virtual const char* lti::kalmanFilter::getTypeName | ( | ) | const [virtual] |
returns the name of this type ("kalmanFilter")
Reimplemented from lti::functor.
| bool lti::kalmanFilter::measurementUpdate | ( | const vector< float > & | measurementVector | ) | [protected] |
Perform measurement update.
Rows of measurementVector must match rows of measurementMatrix.
| void lti::kalmanFilter::reset | ( | ) |
Reset the filter state ( ) and error covariance () to the initial values stored in the parameters.
) and error covariance () to the initial values stored in the parameters.
| bool lti::kalmanFilter::timeUpdate | ( | ) | [protected] |
Perform time update (no control input).
| bool lti::kalmanFilter::timeUpdate | ( | const vector< float > & | controlVector | ) | [protected] |
Perform time update (with control input).
Rows of controlVector must match columns of controlMatrix.
matrix<float> lti::kalmanFilter::errorCovarianceAposteriori [protected] |
matrix of a posteriore estimate error covariance (P)
matrix<float> lti::kalmanFilter::errorCovarianceApriori [protected] |
matrix of a priori estimate error covariance ()
matrix<float> lti::kalmanFilter::kalmanGainMatrix [protected] |
matrix of current Kalman gain (K)
matrixInversion<float> lti::kalmanFilter::myMatrixInvertor [protected] |
matrixInversion used to invert matrices
vector<float> lti::kalmanFilter::systemStateAposteriori [protected] |
system state after measurement update ()
vector<float> lti::kalmanFilter::systemStateApriori [protected] |
system state prior to measurement update ()
matrix<float> lti::kalmanFilter::tempMatrix [protected] |
Temporary matrices and vectors.
matrix<float> lti::kalmanFilter::tempMatrix2 [protected] |
Temporary matrices and vectors.
vector<float> lti::kalmanFilter::tempVector [protected] |
Temporary matrices and vectors.
vector<float> lti::kalmanFilter::tempVector2 [protected] |
Temporary matrices and vectors.